


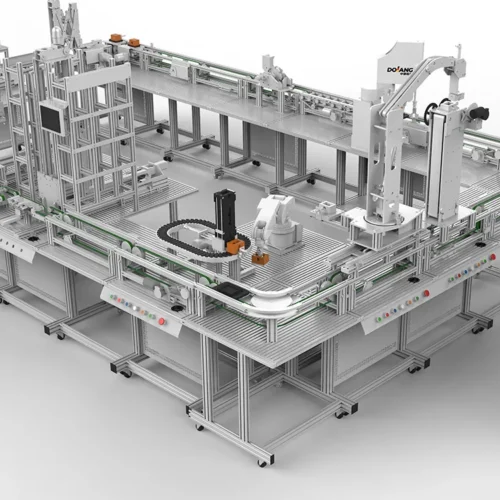
1. Overview
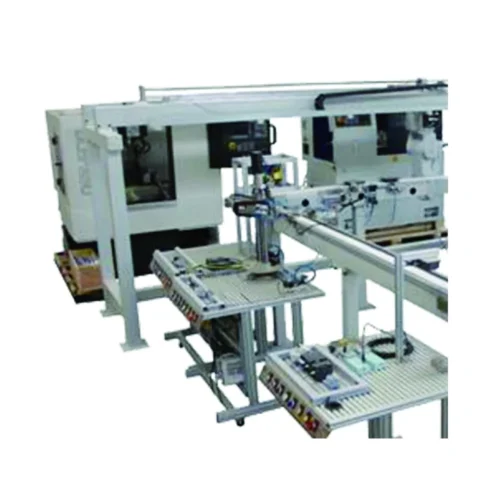
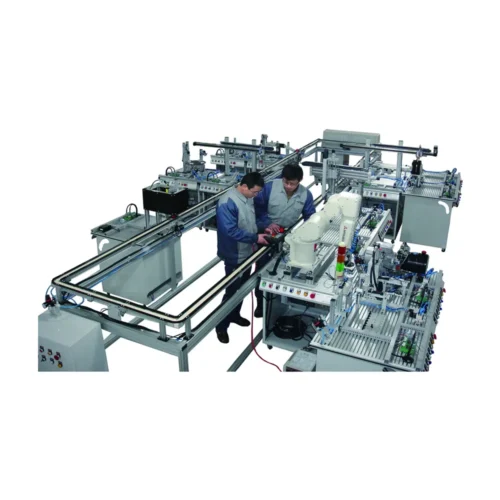
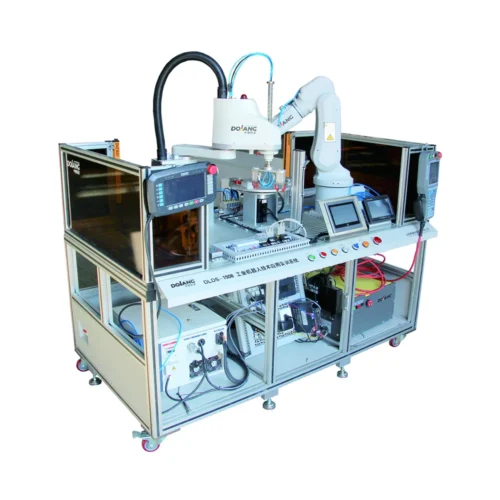
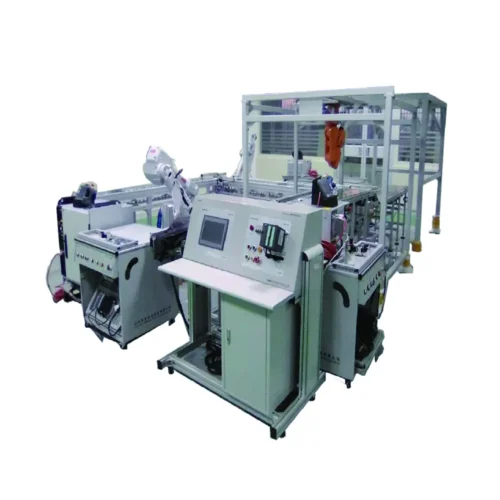
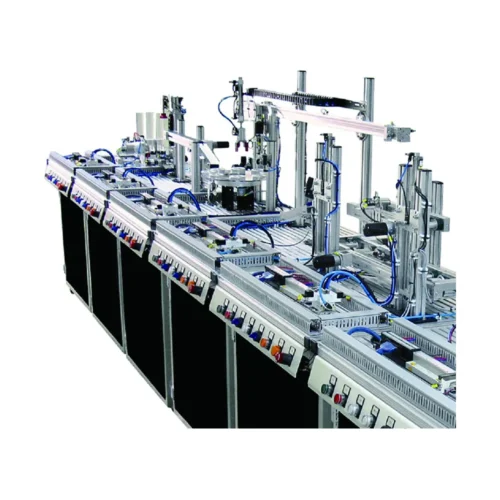
The DLDS-277 platform can carry out skills training and assessment close to industrial field applications such as coordinate calibration of industrial robots, trajectory programming and operation, assembly, handling, palletizing, packaging, sorting, screw locking, grinding and polishing , gluing, industrial vision inspection, etc. It can also be used Carry out the assessment of digital technologies such as robot offline programming and simulation.
Students who use this platform can learn and master skills including sensor detection technology, visual detection technology, RFID reading and writing technology, electrical control technology, motor drive technology, industrial robot technology, PLC technology, configuration technology, production line process design, system maintenance and Fault detection technology, offline programming simulation technology, industrial Ethernet communication technology, etc.
2. Technical Parameter
2.1 Temperature: +5 to +45°; Ambient humidity: ≤85% (25°C).
2.2 System area: length * width * height ≈ 3m * 2m * 1.7 m (width can be adjusted according to site conditions)
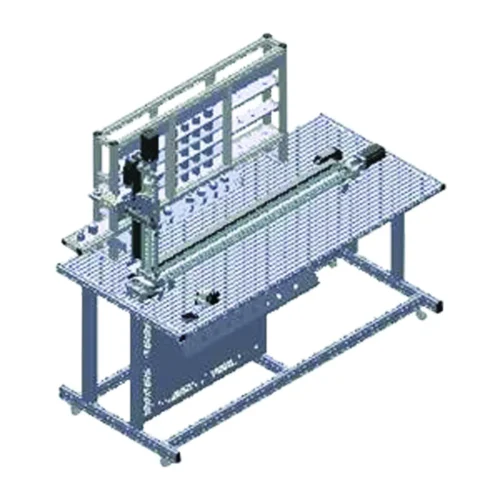
2.3 Equipment size: length * width * height = 1.9m *1.09 m * 1. 7 m
2.4 Machine power: about 3.0 KVA.
2.5 Altitude: ≤4000m.
2.6 Input power: AC220V±10%. Output power supply: DC24V.
2.7 Environment: vibration ≤ 0.5G, no dust, corrosive gas, flammable gas, oil mist, water vapor, dripping water or salt, etc.
2.8 Reliable grounding of the system: grounding impedance <4 ohms.
2.9 Compressed air pressure: 0.3-0.7MPa.
2.10 Cooling method: natural cooling.
3. Achievable training tasks
4.1 Installation of industrial robots
4.2 Installation of industrial robot teaching pendant
4.3 Installation of industrial robot end tools
4.4 Setting industrial robot parameters
4.5 Practical training on industrial robot operating modes and manual speeds
4.6 View common information on industrial robots
4.7 Introduction to industrial robot programming instructions
4.8 Backup and recovery of industrial robot programs
4.9 Practical training on calibration of industrial robot coordinate system
4.10 Industrial robot fault diagnosis and maintenance
4.11 Practical training on reading electrical drawings
4.12 Pneumatic circuit takeover and electrical wiring
4.13 Application of detection switch
4.14 Applications of various sensors
4.15 Application of pneumatic components
4.16 Installation and application of PLC
4.17 Installation and application of RFID
4.18 Installation and application of touch screen
4.19 Robot and PLC communication
4.20 Touch screen and PLC communication
4.21 Industrial robot plane drawing work tasks
4.22 Industrial Robot Surface Work Tasks
4.23 Practical training on industrial robots and visual communication
4.24 Application of quick change tools for industrial robots
4.25 Industrial robot handling and palletizing tasks
4.26 and assembling work tasks of industrial robot special-shaped parts
4.27 Industrial robot reducer force control assembly work tasks
4.28 Industrial robot grinding work task
4.29 Robot disassembly and assembly training of robot simulation software
4.30 RFID reader communication application programming debugging
4.31 Robot offline simulation training









































Reviews
There are no reviews yet.