

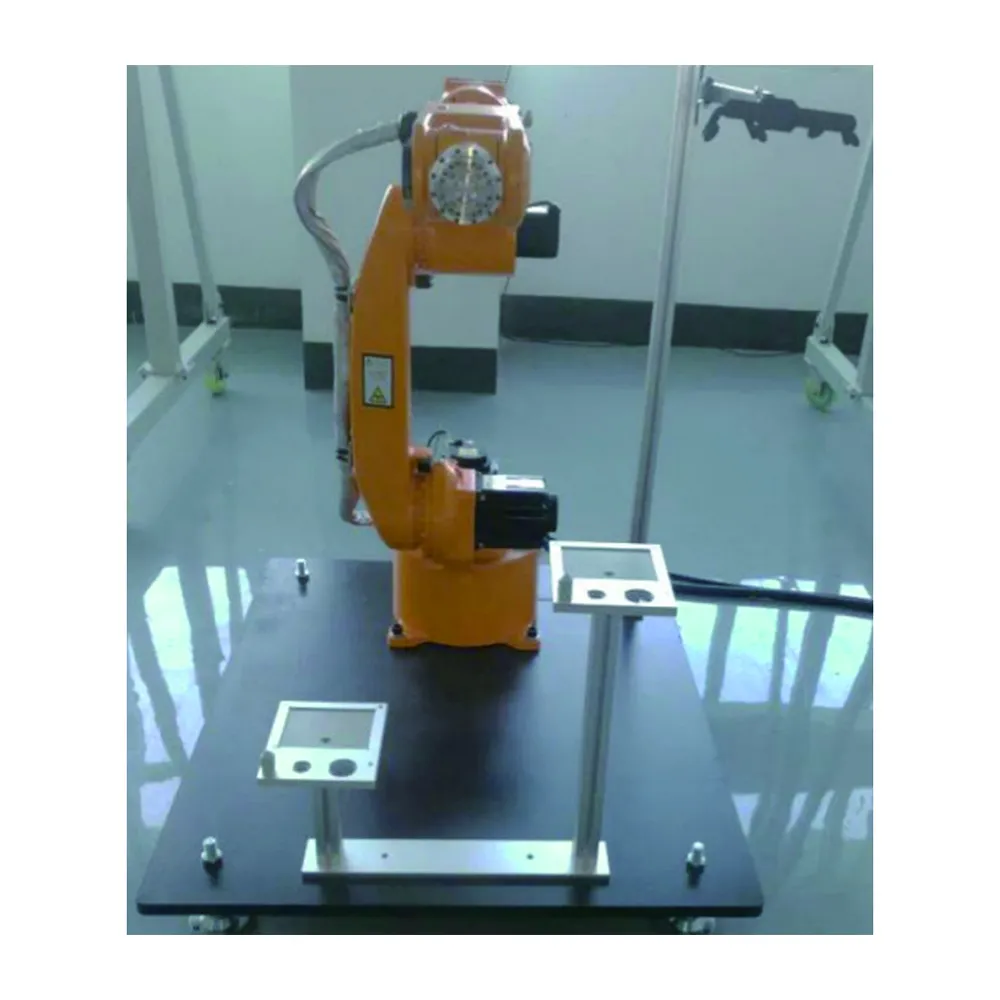



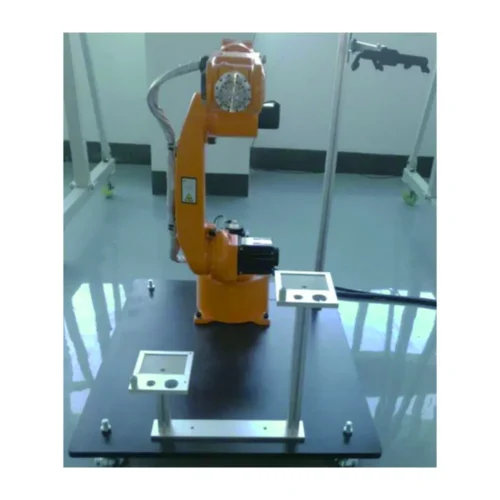



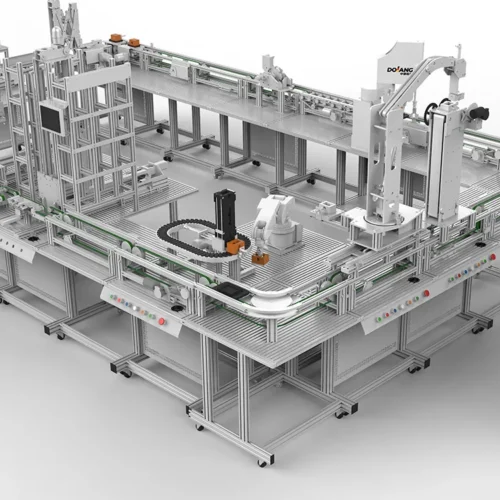
1. Overview
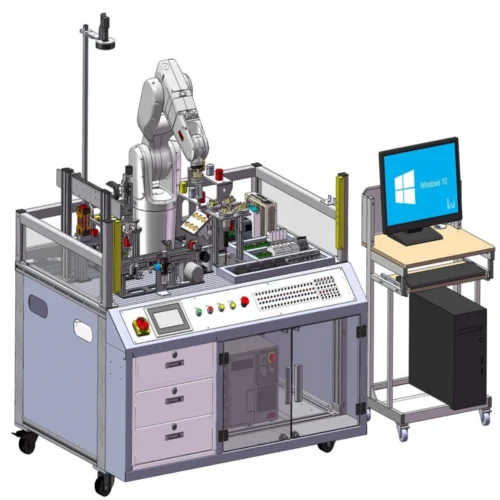
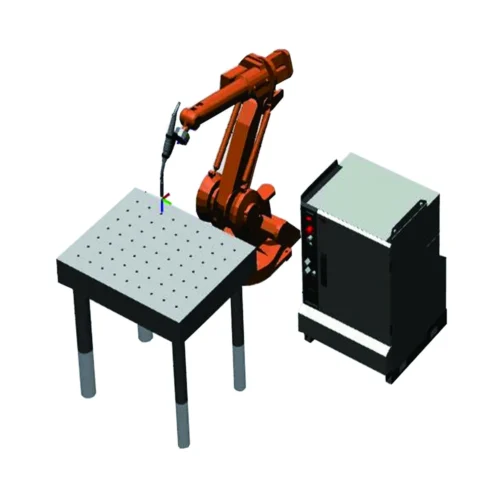
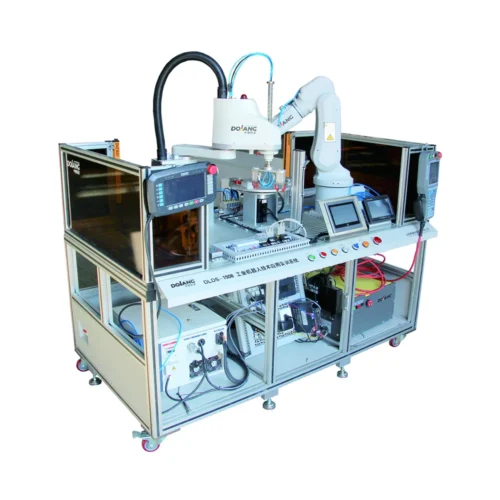
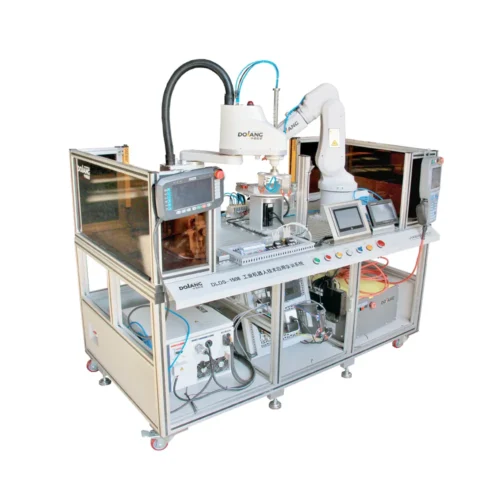
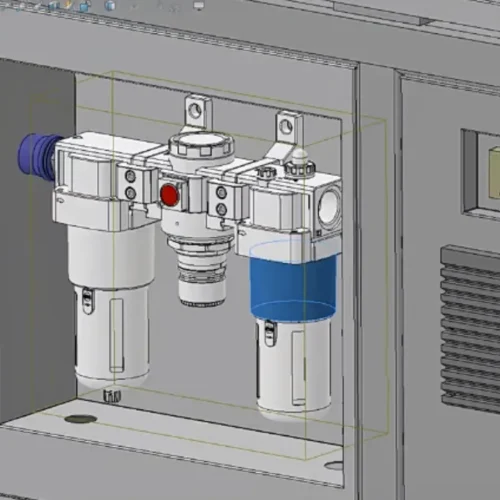
The DLIR-106 industrial robot training system is a typical robotics training system for robot disassembly, operation, and maintenance in technical education. Which consists of an industrial robot body and base, electronic control disassembly and assembly platform, disassembly and assembly parts cart, disassembly and assembly turnover device, robot component placement tooling, mobile gantry crane, work table, tool cart, palletizing module, Pneumatic system, tool kit, teaching machine and bracket, safety protection, industrial robot virtual disassembly training simulation software, etc.
2. Technical Parameters
DLIR-106 Workstation operating environment: areas with less dust, oily fume, and water, as well as no flammable, corrosive liquids or gases. The vibration or shock of the electric control cabinet is ≤0.5G, and the installation distance is ≥500 mm from the wall.
Installation places should be far away from large electrical noise sources (TIG welding devices, etc.).
The installation flatness of the robot base is less than 0.5mm.
3. Industrial Robot Training Content
1) Industrial robot installation and Parameter setting
2) Practical industrial robot training in operation mode and manual speed
3) Industrial robot programming training
4) Backup and recovery of industrial robot programming
5) Initial power on and IO configuration of industrial robot
6) Practical industrial robot training coordinate system calibration
7) Setting of the safe working area for industrial robot
8) Fault diagnosis and maintenance of industrial robot
9) Practical training in reading electrical drawings
10) Pneumatic circuit connecting pipe and electrical wiring
11) Application of detection switch
12) Application of various sensors
13) Application of pneumatic components
14) Installation and application of PLC
15) Installation and application of touchscreen
16) Communication between robot and PLC, HMI, Servo system
17) Application of quick change tools for industrial robots
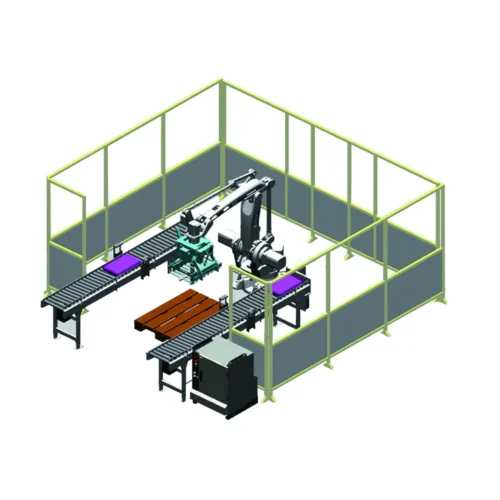
18) Handling and palletizing tasks of industrial robots
19) Assembly task of industrial robot digital keyboard
20) Industrial robot gift packaging tasks
21) Industrial robot simulation welding task
22) Multi-variety material transfer and stacking tasks
23) Industrial robot trajectory drawing task
24) Curved surface task of industrial robot
25) Robot simulation software training
26) Common fault analysis and precision detection method of industrial robot
27) Industrial robot servo system commissioning





































Reviews
There are no reviews yet.