

1. Overview
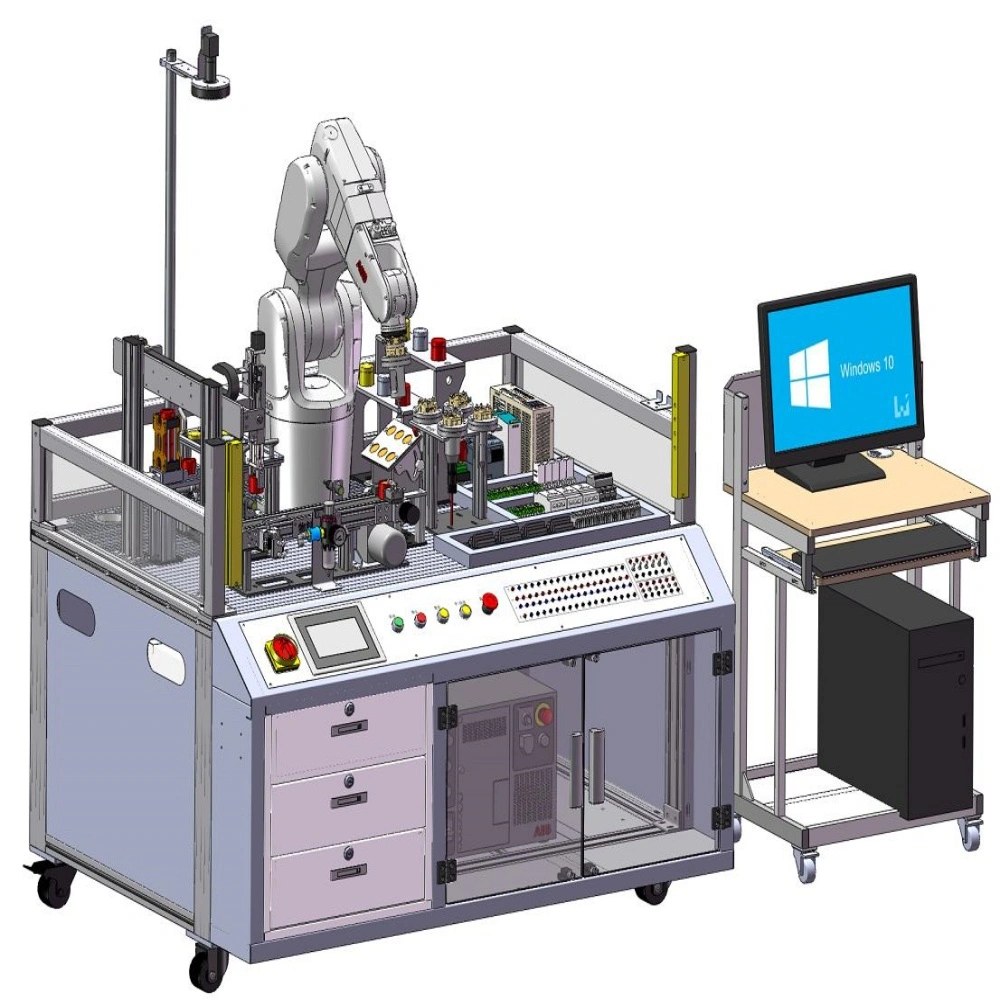
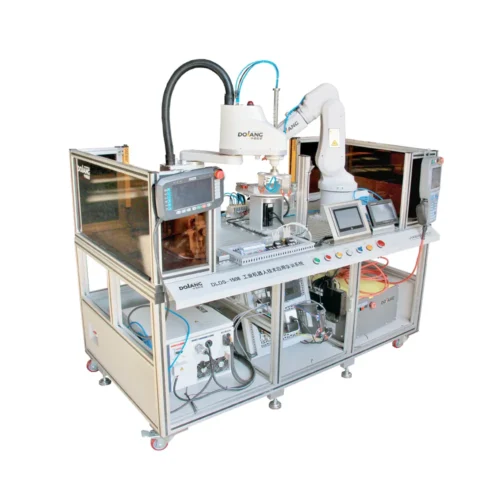
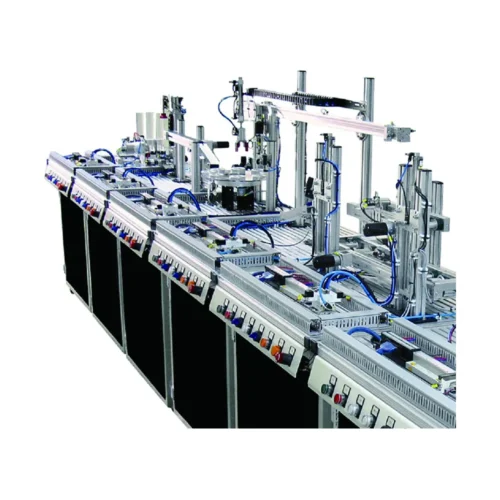
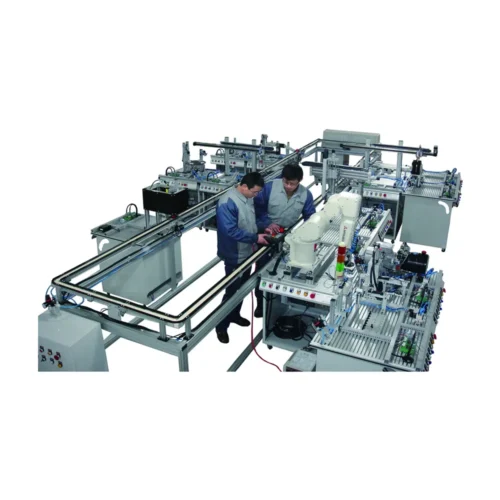
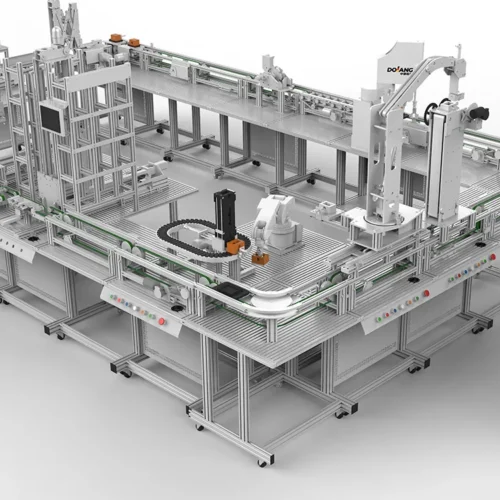
The platform can carry out skills training and assessment close to industrial field applications such as coordinate calibration of industrial robots, trajectory programming and operation, robot following, handling, palletizing, packaging, sorting, gluing, industrial visual inspection, etc. It can also be used for offline robot programming and Assessment of digital technologies such as simulation.
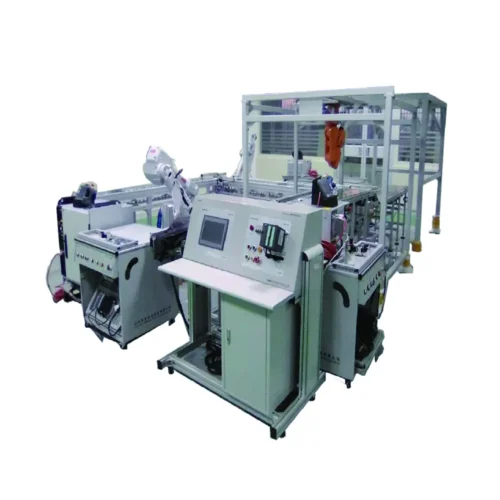
Process: feeding → manipulator grabs materials → conveyor belt transportation → placing commemorative coins → robot follows → stamping → storage
2. Technical parameters
2.1 Temperature: +5 to +45°; Environmental humidity: ≤85% (25°C).
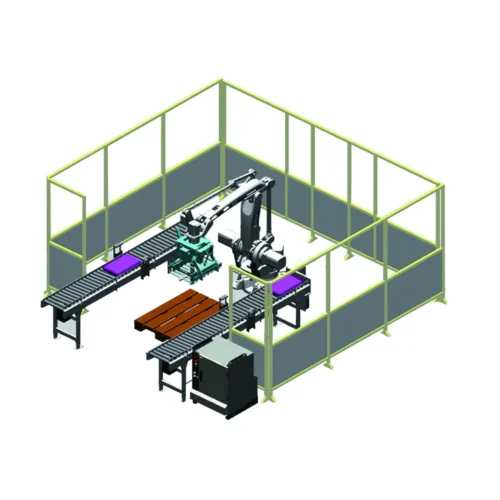
2.2 System area: length × width × height ≈ 2.4m × 2m × 1.7m (width can be adjusted according to site conditions)
2.3 Equipment size: length × width × height = 1.5m × 1.1m × 1.17m
2.4 Machine power: about 2.5KVA.
2.5 Altitude: ≤4000m.
2.6 Input power supply: AC220V±10%.
Output power supply: DC24V.
2.7 Environment: Vibration ≤ 0.5G, no dust, corrosive gas, flammable gas, oil mist, water vapor, dripping water or salt, etc.
2.8 Reliable grounding of the system: grounding impedance <4 ohms.
2.9 Working air pressure: 0.6MPa.
2.10 Cooling method: natural cooling.
3. Training items
Section 1, Robot Training
1)Installation of industrial robots
2) Installation of industrial robot teaching pendant
3) Installation of industrial robot end tools
4) Setting of industrial robot parameters
5) Practical training on industrial robot operating modes and manual speeds
6) View common information on industrial robots
7) Introduction to industrial robot programming instructions
8) Backup and recovery of industrial robot programs
9) Practical training on calibration of industrial robot coordinate system
10) Industrial robot fault diagnosis and maintenance
Section 2, Electrical application training
11) Practical training on reading electrical drawings
12) Pneumatic circuit takeover and electrical connections
13) Application of detection switch
14) Application of various sensors
15) Application of pneumatic components
16) Installation and application of PLC
17) Installation and application of touch screen
Section 3, Equipment Communication Application Training
18)Robot and PLC communication
19) Touch screen and PLC communication
Section 4: Equipment comprehensive task training
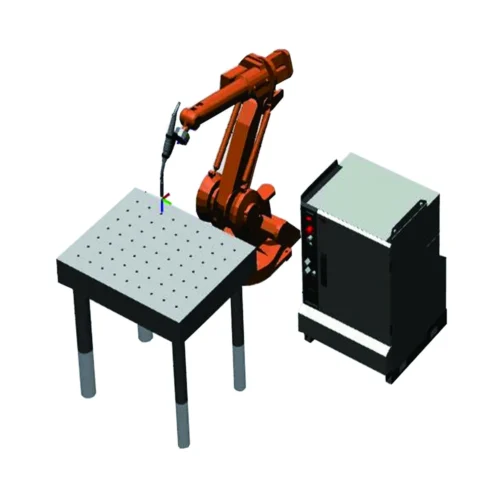
20) Industrial robot plane trajectory work tasks
21) Industrial robot curved surface work tasks
22) Practical training on industrial robots and visual communication
23) Application of industrial robot quick-change tools
24) Industrial robot handling and palletizing tasks
25)Visual sorting work tasks
26) Commemorative coin packaging tasks
27) Robot following task
28) Robot disassembly and assembly training using robot simulation software
29) Robot offline simulation training







































Reviews
There are no reviews yet.