




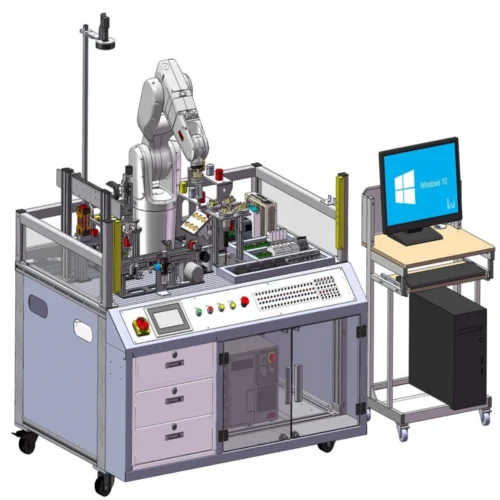
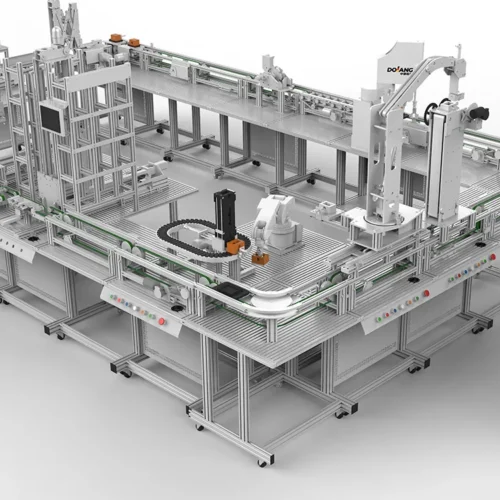
DLRB-460 Robot handling &palletizion workstation
1.Overview
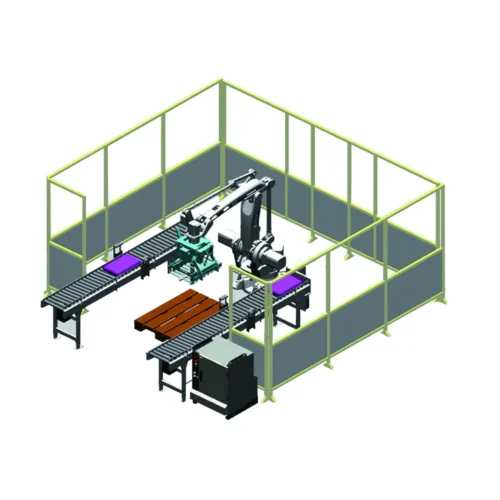
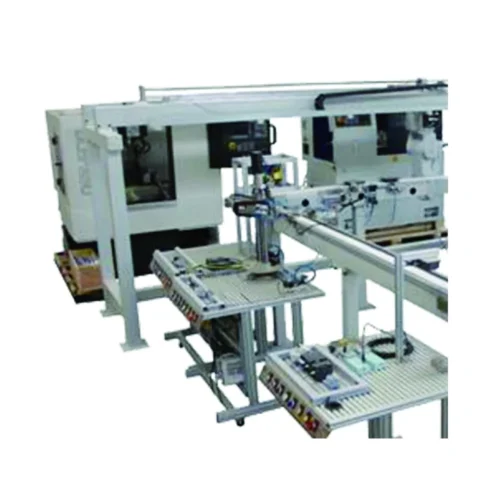
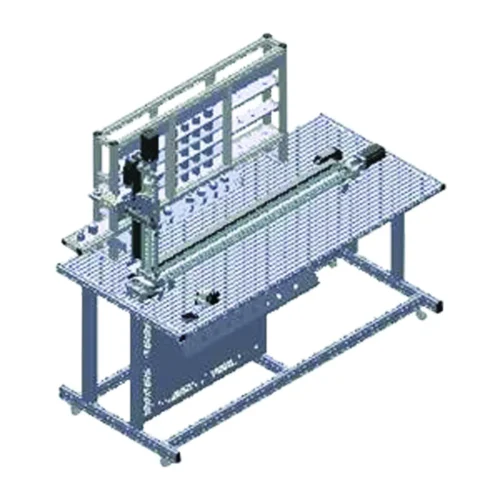
Two roller conveyor lines are installed in the workstation. Each production line is equipped with a photoelectric sensor. The workpiece is manually placed on the material end of conveyor line A. The conveyor line conveys the workpiece to the gripping station at the end of the line. The robot can grab the work station to grab the workpiece, place it in the placing station of the B conveying line, and then transport it to the grabbing station of the B line.
The robot can repeatedly grab between the two lines to realize the palletizing teaching function. At the same time, a palletizing station is set between the two roller conveyor lines of the robot palletizing station to realize the teaching function of the entire palletizing.
DLRB-460 Robot handling &palletizion workstation is widely used in technical vocational schools, it is mechatronics trainer used in technical vocational schools and institute, it is one of mechatronics training system







































Reviews
There are no reviews yet.